Subscribe to get full access to this operation and the extensive Knee Surgery Atlas.
FREE TRIAL
Learn the Taylor Spatial Frame(Smith and Nephew) Introduction to hardware, frame application and use of software for deformity correction surgical technique with step by step instructions on OrthOracle. Our e-learning platform contains high resolution images and a certified CME of the Taylor Spatial Frame(Smith and Nephew) Introduction to hardware, frame application and use of software for deformity correction surgical procedure.
Gavril Ilizarov developed his “Ilizarov apparatus” in Siberia treating veterans following the second world war. Although not the first to use external fixation, his use of rings connected to the bone with tensioned wires, ideally perpendicular to each other, and connected across segments with threaded rods creates an excellent biomechanical environment to promote bone healing. He later discovered, inadvertently, that gradual distraction of a ‘corticotomy’ in a stable biomechanical environment, leads to new bone formation and thus distraction osteogenesis (or distraction histogenesis, known as the ‘Ilizarov technique’) was born allowing limb lengthening and the management of segmental bone defects with a technique that results in normal bone formation.
Knowledge of Ilizarov’s methods was initially confined to Soviet Russia until Carlo Mauri, an Italian journalist and explorer, travelled to the Ilizarov institute in Kurgan for treatment of his tibial non-union. This healed successfully and Mauri’s Italian surgeons subsequently invited Ilizarov to Northern Italy to present his methods. Following this Ilizarov’s teachings spread rapidly across Europe and North America.
Whilst deformity correction is entirely possible using Ilizarov’s original apparatus with the construction of physical hinges and use of plates and “motors” to correct rotation or translation this is often a complex process involving multiple frame adjustments or rebuilds to correct complex deformity.
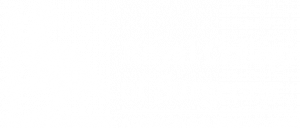
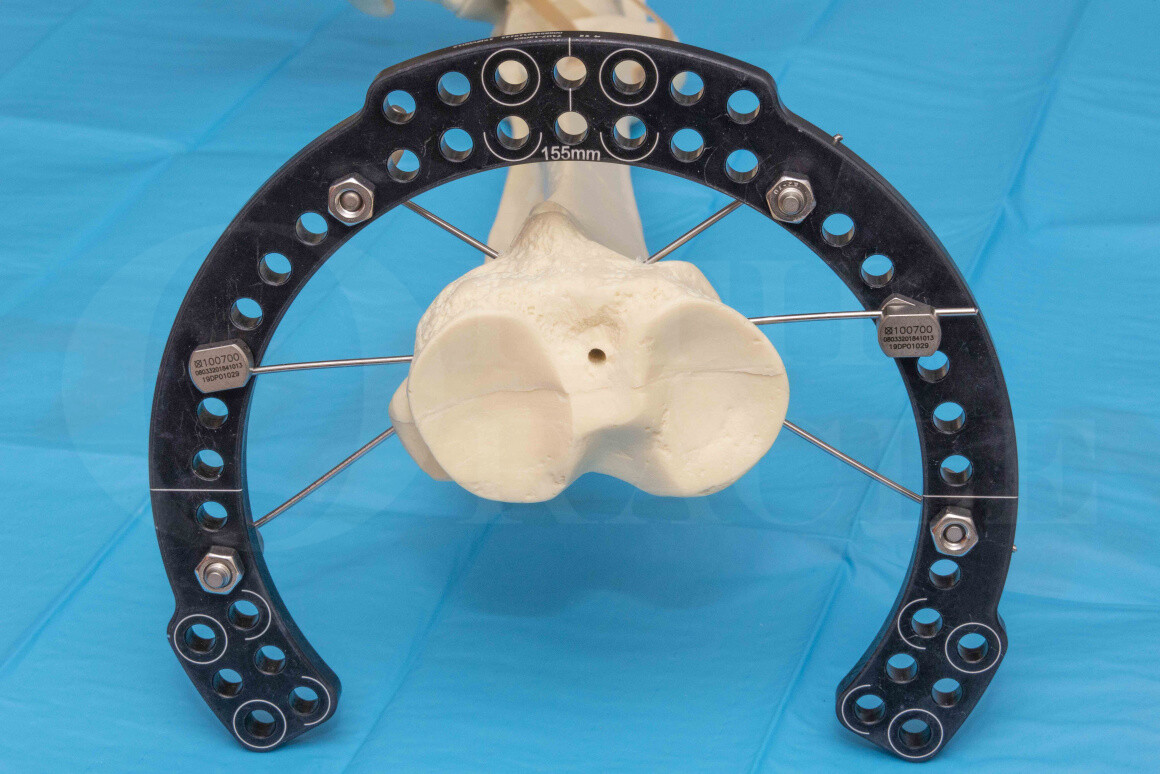
Due to the challenges of complex deformity correction with the standard Ilizarov apparatus, Charles Taylor, an orthopaedic surgeon in Memphis, and his brother, an engineer, developed the Taylor Spatial Frame (TSF). The TSF is applied to bone using the same principles as an Ilizarov frame however bone segements are connected with six ‘struts’ rather than threaded rods. The six struts make up a hexapod formation. This concept is borrowed from the Stewart Gough platform, a piece of engineering equipment developed in the Dunlop factory in Birmingham, to test aircraft tyres. The Stewart Gough platform and TSF hexapod configuration allow movement in 6 planes and thus the TSF can simultaneously correct angulation, length, rotation and translation.
The original TSF used printed algorithms to achieve correction however correction is now performed using software accessed from the TSF website. By telling the software the deformity parameters, the configuration of the frame (ring size, strut length) and where a fixed point on the frame (the centre of the reference ring) is in relation to the point of interest in the bone (the origin) the software is able to calculate how the frame should be adjusted to correct the deformity.
The objective of this instructional technique is to show in detail how to construct and apply a Taylor Spatial frame, to explain the principles of deformity correction using the frame and how to use the software required.
I am grateful to Smith and Nephew for permission to illustrate certain aspects of the technique using their own images.
OrthOracle readers will also find the following instructional orthopaedic techniques of interest:
Minimally invasive distal tibial osteotomy and correction of deformity with the Taylor Spatial Frame
Tibial fracture non-union correction using Taylor Spatial Frame (Smith and Nephew)
Tibial shaft fracture: Fixation with a Taylor Spatial Frame (TSF) circular external fixator (Smith and Nephew)
Author: Paul Fenton FRCS (Tr and Orth)
Institution: Queen Elizabeth Hospital, Birmingham, Uk.
Clinicians should seek clarification on whether any implant demonstrated is licensed for use in their own country.
In the USA contact: fda.gov
In the UK contact: gov.uk
In the EU contact: ema.europa.eu

 00:00
00:00